Добрый день. Подскажите пожалуйста Ноутбук Packard bell q5ws1 не работает тачпад после переустановки с флэшки.
ACPI\ETD0500
*ETD0500
Вот ид
До установки драйверов он стоял в неиз.устрой, после устаноки стоит где надо с желтым восклицательным знаком.Мне кажется я ни те драйвера установил
———————————————————
И не надо мне писать письма или в личку по вопросам, связанным с ноутбуками, всё равно ж не отвечу;))
Всё это обсуждается на ФОРУМЕ.
| Как решилась ваша проблема с неработающим тачпадом? Ситуация аналогичная вашей: Перепробовал много чего: включение кнопки Fn+F7, разные режимы (Advanced и Basic) тачпада в BIOS, различные настройки самого BIOS, разные версии и производителей тачпада (ELAN и Synaptics), пару раз переустанавливал различные версии ОС (1809, 1903, 1909), обновил BIOS до версии 1.26. Ничего не помогло. Ситуация на данный момент в Диспетчере устройств с отображением скрытых устройств следующая: Windows 10 должна устанавливаться в UEFI, на диск, размеченный в GPT. Устройства HID Human Interface Devices Windows 10 — HID-совместимая сенсорная панель. — Microsoft Input Configuration Device. — Устройство HID на шине I2C. Далее, в свойствах устройства вы можете узнать и настроить: Общие: — Вы можете узнать тип устройства. Драйвер: — Вы можете узнать поставщика драйвера. — Сведения о файлах драйвера. — Вы можете обновить драйвер. — Вы можете откатить драйвер к предыдущему. — Можно отключить устройство. — Можно удалить драйвер. Сведения: — Вы можете узнать значения свойств устройства. — Выберите свойство и вам автоматически покажут его значение. — Вы можете узнать характеристики, класс, код ошибки устройства и т.д. События: — Вы можете узнать события, которые происходили с устройством. — Вы можете узнать дату и время события. — Можно узнать описания и сведения событий. — В конце нажмите на кнопку OK, чтобы сохранить сделанные изменения. Как настроить I2C-связь на ArduinoВ этом уроке мы обсудим, что такое протокол связи I2C, как он работает и как его использовать на Arduino. Для демонстрации мы построим проект, использующий I2C-соединение для обмена данными между двумя микроконтроллерами Arduino. Что такое I2C?
Как видно на диаграмме, преимущество использования I2C состоит в том, что для связи с несколькими устройствами требуется всего два провода. Вся связь проходит по двум проводам к ведущему и ведомым устройствам и от них. Это очень полезно при выполнении проектов Arduino, так как Arduino имеет ограниченное количество входных/выходных контактов. Многие датчики и модули, предназначенные для Arduino используют I2C для связи. Сеть I2CВедомое устройство (наследник)Все ведомые устройства имеют I2C-адрес, который используется для идентификации устройства в сети. I2C-адрес позволяет ведущему устройству передавать данные конкретному ведомому устройству на шине. Ведущее устройство (мастер)Ведущие устройства могут отправлять и получать данные. Ведомые устройства реагируют на все, что посылает ведущее устройство. При отправке данных на шину только одно устройство может отправлять данные одновременно. Эти два провода называются SDA и SCL. Провод SDA используется для связи между ведущим и ведомым устройствами. Линия SCL несет тактовый сигнал, используемый для правильной синхронизации связи. Для поддержания обоих проводов в состоянии HIGH необходимы импульсные или подтягивающие (pull-up) резисторы. Логические уровниБудьте внимательны при подключении I2C устройств к Arduino. Arduino выводит I2C-сигналы на 5В логическом уровне, но I2C-устройства работают с различными напряжениями логического уровня. Таким образом, I2C устройство, которое работает на 3,3 В может быть повреждено при подключении к Arduino. В паспорте устройства должно быть указано напряжение логического уровня. Если подтягивающие резисторы подключены к +5В, все устройства должны быть совместимы для работы с логическим уровнем +5В. Использование I2CЧтобы продемонстрировать, как использовать I2C в Arduino, давайте создадим проект, который посылает данные туда и обратно между двумя ардуинами. Мы будем использовать I2C связи для изменения скорости мигания светодиода контакта 13 на одном Arduino, в зависимости от положения потенциометра, подключенного к другому Arduino. Один Arduino будет выступать в качестве мастера, а другой Arduino будет выступать в качестве ведомого. Пины I2C ArduinoArduino имеет специальные контакты для I2C, которые имеют встроенные подтягивающие резисторы в соответствии с требованиями протокола I2C.
Компоненты оборудованияЧтобы создать этот проект, вам понадобятся следующие компоненты: Схема соединенияПосле того, как вы соберете все детали, пришло время собрать проект. Следуйте нижеприведенной электрической схеме, чтобы все подключить:
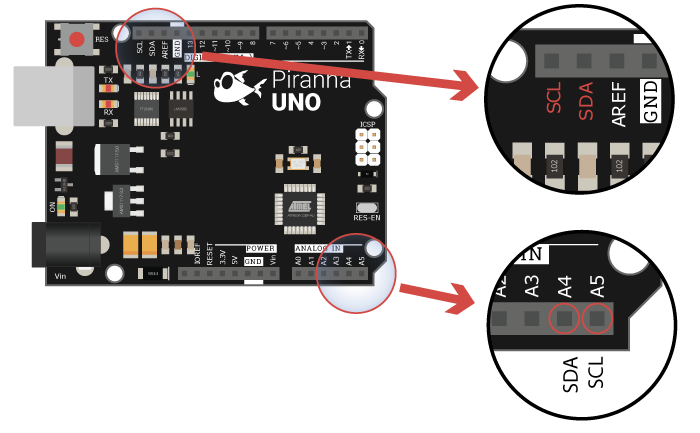
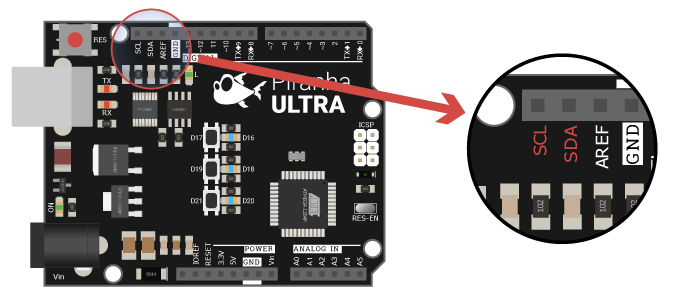
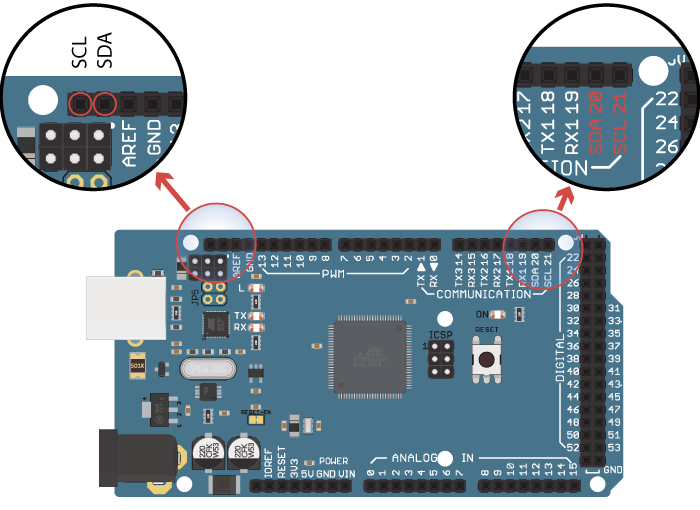
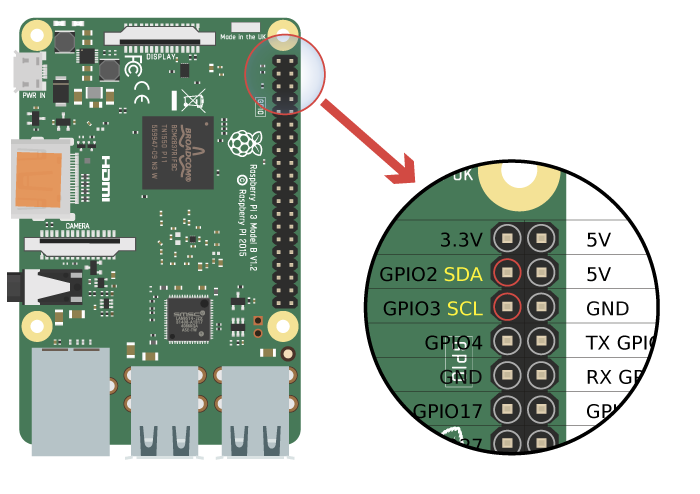
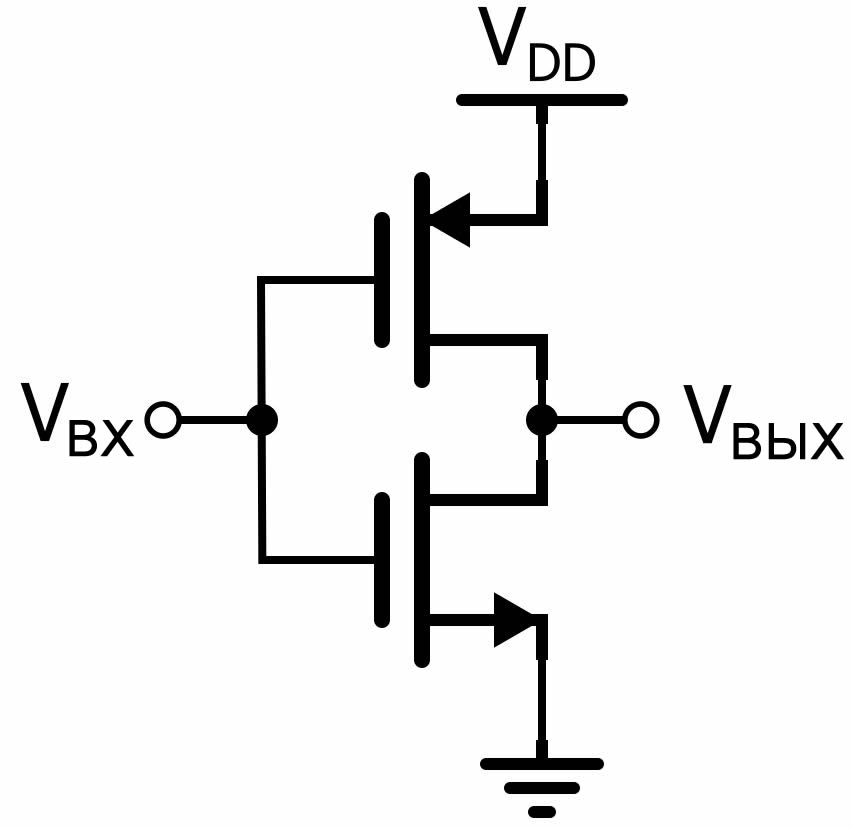
Вы могли заметить, что у нас нет подтягивающих резисторов на линиях SDA и SCL. Подтягивающие резисторы уже встроены в I2C контакты Arduino, так что они нам не нужны. Скетч для мастераУ нас есть два Ардуино в нашей сети I2C, так что у нас есть два набора скетчей. Один для мастера Ардуино, а другой для наследника Ардуино. Между двумя эскизами нет большой разницы, как вы увидите позже. Теперь откройте Arduino IDE и загрузите код ниже на мастер Arduino: Объяснение скетча для мастераБиблиотека WireДля использования встроенного интерфейса I2C Arduino мы будем использовать библиотеку Wire. Эта библиотека поставляется в стандартной комплектации с Arduino IDE. Как и в других библиотеках Arduino, библиотека Wire имеет готовые I2C функции, чтобы сделать кодирование проще для нас. Чтобы использовать функции библиотеки Wire, мы должны добавить его сначала в наш эскиз. В эскизе выше, у нас есть следующая строка в верхней части: После включения библиотеки мы можем использовать встроенные функции библиотеки. Отправка данныхWire.beginTransmission()Мы инициируем команду отправки, сначала информируя устройства на шине о том, что мы будем отправлять данные. Wire.write()Wire.endTransmission()Wire.requestFrom()Полным синтаксисом запроса данных от ведомого устройства является Wire.requestFrom(адрес, количество). Внутри loop() мы используем Wire.requestFrom(0x08, 1); для запроса одного байта данных от ведомого устройства 0x08. Write.available()Wire.read();Скетч для наследника (ведомого)Теперь загрузите этот код ведомому Ардуино: Объяснение скетча для ведомогоДля ведомых устройств адрес является обязательным. Для нашего проекта адрес для ведомого устройства будет 0x08. Это может быть любой адрес, но убедитесь, что он уникален в сети I2C. Некоторые I2C ведомые устройства также имеют определенные I2C-адреса, поэтому сначала проверьте спецификацию. Обработчики событийWire.onReceive()В части скетча setup() мы добавляем функцию Wire.onReceive(handler) для регистрации функции (обработчика), которая будет управлять полученными данными. Wire.onRequest()Единственное отличие заключается в том, что она обрабатывает события запроса данных. Запросы данных поступают от основных устройств. Тестирование Arduino I2CИспользуя Arduino IDE, загрузите эскиз мастера Arduino в одну из Ардуино. Затем загрузите скетч наследника в другую Arduino. Наш код принимает положение потенциометра мастера и посылает его ведомому устройству через I2C. Затем ведомое устройство использует полученное значение для настройки времени задержки мигания светодиода. То же самое происходит и с положением потенциометра ведомого. Общие сведения:Подключение:Шина поддерживает подключение до 112 устройств (при 7-ми битной адресации) по двум проводам (плюс GND и Vcc), может иметь несколько ведущих и ведомых. При использовании нескольких ведущих, каждый из них должен поддерживать этот режим и уметь определять состояние занятой шины. I²C на ArduinoArduino UNO R3/Piranha UNO На Arduino UNO R3/Piranha UNO шина I2C находится на выводах A4, A5. Также в эти выводы продублированы на колодке с цифровыми выводами рядом с кнопкой Reset. Piranha ULTRA На Piranha ULTRA шина I²C не занимает аналоговые выводы A4, A5 и находится на цифровой колодке рядом с кнопкой Reset, выводы обозначены SDA и SCL Arduino MEGA R3 На Arduino MEGA R3 шина I²C находится на цифровой колодке на крайних выводах, близких к разъёму USB и на выводах 20, 21. Выводы объединены. Примеры для Arduino В этом примере на матрицу выводится изображение стрелки. Стоит заметить, ко всем нашим модулям написаны библиотеки с высокоуровневым интерфейсом и вовсе не обязательно работать с матрицей на низком уровне. Подробнее о работе с библиотекой матрицы можно узнать по этой ссылке. I²C на Raspberry PiНа Raspberry Pi I²C выводы это 3-й и 5-й выводы колодки, GPIO2 и GPIO3 по номенклатуре BCM и выводы 8, 9 по номенклатуре WiringPi. Примеры для Raspberry Подробнее о шине I²C:Резисторы, ёмкость и длина линий шиныВ официальном описании от NXP ничего не сказано о максимальной длине шины, но не стоит этим злоупотреблять. Шина была придумана для обмена информации между интегральными схемами в пределах одной платы одного устройства. В расчёт бралась только паразитная ёмкость линии, которая сказывается на скорости нарастания фронта волны. От этой ёмкости зависит номинал подтягивающих резисторов. Можно подобрать резисторы так, чтобы фронт волны нарастал согласно спецификации и при 100-метровой длине проводов, но это не избавляет от помех, которые влечёт за собой несимметричная электрическая реализация. Опять же, при слишком маленьком сопротивлении качество сигнала улучшается, но при этом растёт ток который необходимо пропускать устройствам через выводы для притяжки линий. При использовании шины на модулях не существует принятого стандарта установки подтягивающих резисторов на ведущем или ведомом. У Arduino подтягивающие резисторы отсутствуют и для работы с шиной нужен хотя бы один модуль с ними. У Raspberry Pi на плате установлены подтягивающие резисторы номиналом 1,7 килоОм и для неё нет необходимости в подтяжке на модулях. Сигналы и специальные биты шиныУстанавливаемые только ведущим Устанавливаемые ведущим и ведомым Обмен даннымиПри обмене данными тактированием занимается только ведущий, а ведомый может удерживать линию тактирования только если не успевает за ведущим, так называемое растягивание тактирования (clock-stretching). Не все модули поддерживают удержание. Установка бита на линии данных может происходит в момент, когда линия тактирования прижата, а считывания, когда линия отпущена (подтянута к Vcc), но в большинстве случаев это происходит по фронту волны на линии тактирования. Рассмотрим пример простого обмена данными: Запись в регистры ведомого. Данные взяты из примеров, приведённых выше. После сигнала Start и указания адреса ведущий записывает адрес регистра с которого будет производиться дальнейшая запись. Стоит заметить, что у ведомого есть внутренний счётчик и каждый последующий байт после подтверждения будет записан в следующий регистр. Таким образом байт со значением 0x00 будет записан в регистр 0x11, байт со значением 0x18 будет записан в регистр 0x12, байт со значением 0x3C будет записан в регистр 0x13 и т. д. В этом примере биты ACK устанавливает ведомый. Вот так сигналы этого примера выглядят на осциллографе: Чтение из регистров ведомого. Предположим, мы хотим прочитать байт из регистра 0x13. После сигнала Start и указания адреса ведущий записывает адрес регистра, который необходимо прочитать. Далее следует сигнал Restart (или Stop, затем Start). Ведущий снова выводит адрес ведомого, но уже с битом Read (чтения). Ведомый устанавливает бит ACK и во время следующих 8-ти импульсов тактирования выводит данные на линию SDA. На девятом импульсе уже ведущий устанавливает бит ACK (или NACK, если данные не удалось прочитать) и завершает обмен сигналом Stop. СкоростьПервоначальный стандарт I²C был реализован на скорости 100 кГц. С тех пор появились и другие реализации шины, но большинство устройств работают на этой скорости. Так же известны случаи когда скорость шины специально снижена, чтобы увеличить расстояние передачи и уменьшить чувствительность к помехам. Не все модули могут работать на сниженной скорости. Шина I2C. Подробности аппаратной реализацииОсновная информация для понимания и проектирования аппаратного обеспечения, необходимого для шины I2C. Дополнительная информацияИногда небольшое усложнение – это хорошоПротокол I2C отличается некоторыми непростыми особенностями: вы не просто соединяете выводы нескольких микросхем вместе, а затем позволяете низкоуровневым аппаратным средствам брать управление на себя, пока вы читаете или записываете в соответствующий буфер, как это примерно происходит в случаях с SPI (последовательным периферийным интерфейсом) и UART (универсальным асинхронным приемником/передатчиком). Но сложность I2C небезосновательна; остальная часть данной статьи поможет вам понять несколько нюансов аппаратной реализации, которые делают I2C настолько универсальным и надежным вариантом для последовательной связи между несколькими независимыми микросхемами. Открытый стокОпределяющей особенностью I2C является то, что каждое устройство на шине, должно подключаться к линиям тактового сигнала (сокращенно SCL) и сигнала данных (сокращенно SDA) через выходные драйверы с открытым стоком (или открытым коллектором). Давайте посмотрим, что это на самом деле означает. Сначала рассмотрим типовой CMOS (инвертирующий) выходной каскад:
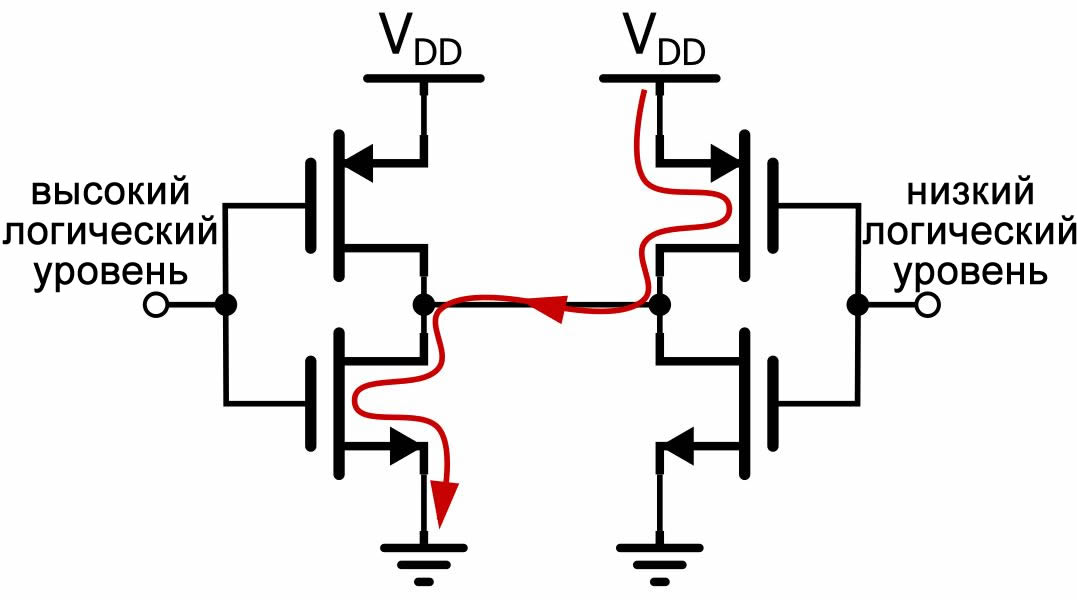
Если на входе присутствует высокий логический уровень, NMOS транзистор открыт, а PMOS транзистор закрыт. Таким образом, выход имеет низкоомное соединение с землей. Если на входе присутствует низкий логический уровень, ситуация меняется на противоположную, а выход имеет низкоомное соединение с VDD. Это называется двухтактным выходным каскадом, хотя это название не особенно информативно, поскольку оно не подчеркивает низкое сопротивление соединений, которые управляют выходом. В общем случае вы не можете напрямую соединять два двухтактных выхода, поскольку ток будет свободно протекать от VDD до земли, если на одном выходе выдается логическая единица, а на другом – логический ноль.
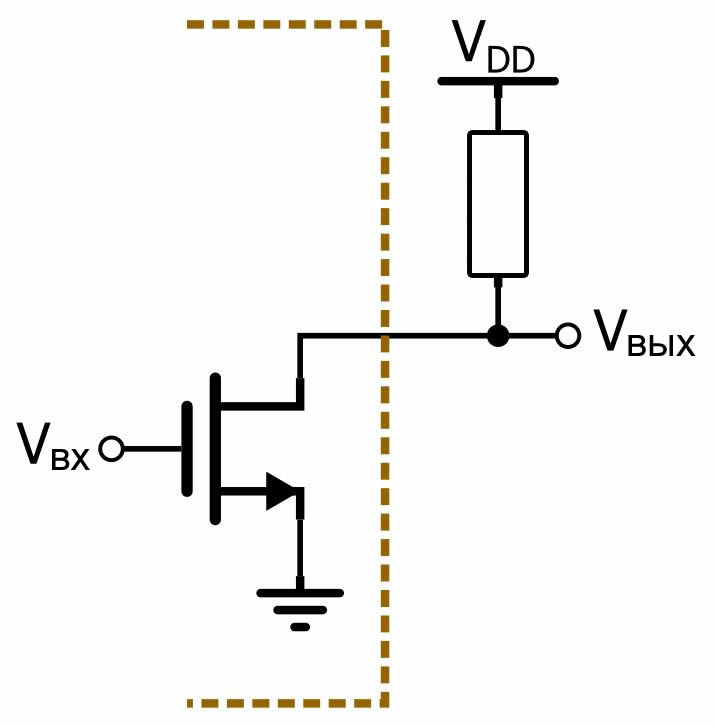
Теперь рассмотрим схему с открытым стоком:
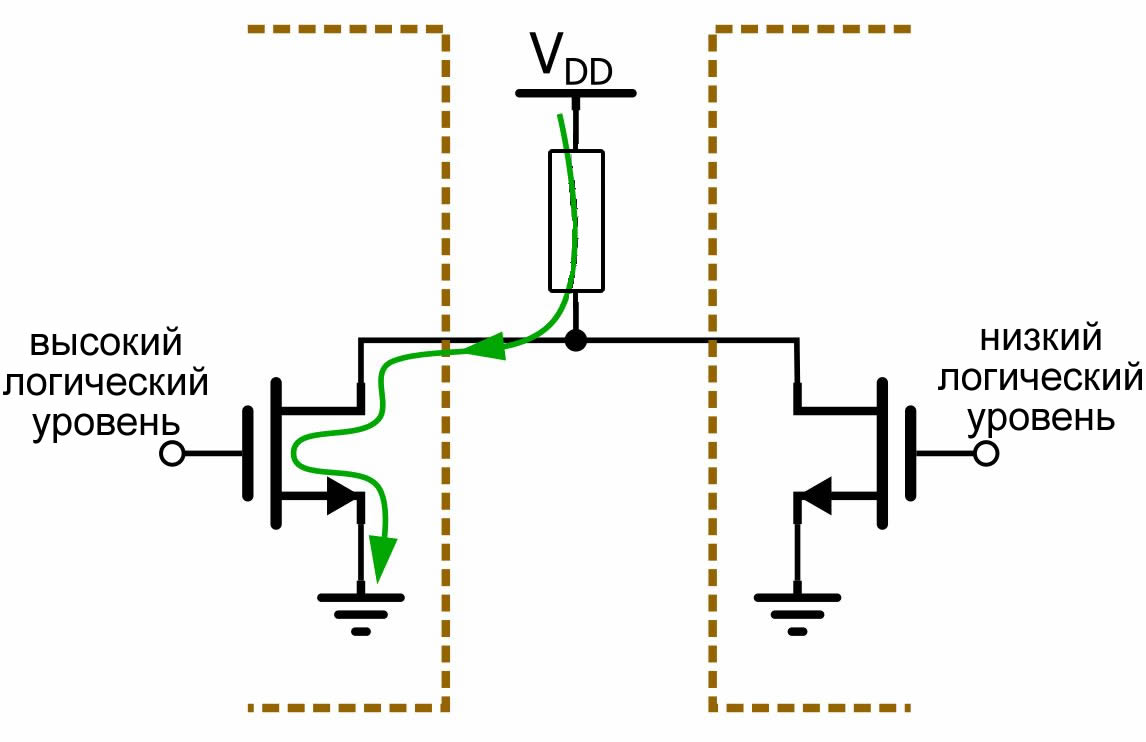
PMOS транзистор был заменен резистором, внешним по отношению к микросхеме. Если на входе присутствует высокий логический уровень, NMOS транзистор обеспечивает низкоомное соединение с землей. Но если на вход подается низкий логический уровень, NMOS транзистор выглядит как разомкнутая цепь, а это означает, что выход подтягивается к VDD через внешний резистор. Такой механизм приводит к двум важным отличиям. Во-первых, появляется неочевидное рассеивание мощности, когда на выходе низкий логический уровень, поскольку ток протекает через резистор, через канал NMOS транзистора на землю (в двухтактной схеме этот ток блокируется высоким сопротивлением закрытого PMOS транзистора). Во-вторых, выходной сигнал ведет себя по-другому, когда на выходе высокий логический уровень, так как выход подключен к VDD через гораздо более высокое сопротивление (обычно не менее 1 кОм). Эта особенность позволяет напрямую соединять два (и более) устройства с открытым стоком: даже если на одном из них низкий логический уровень, а на другом – высокий логический уровень, то подтягивающий резистор гарантирует, что ток не протекает свободно от VDD на землю.
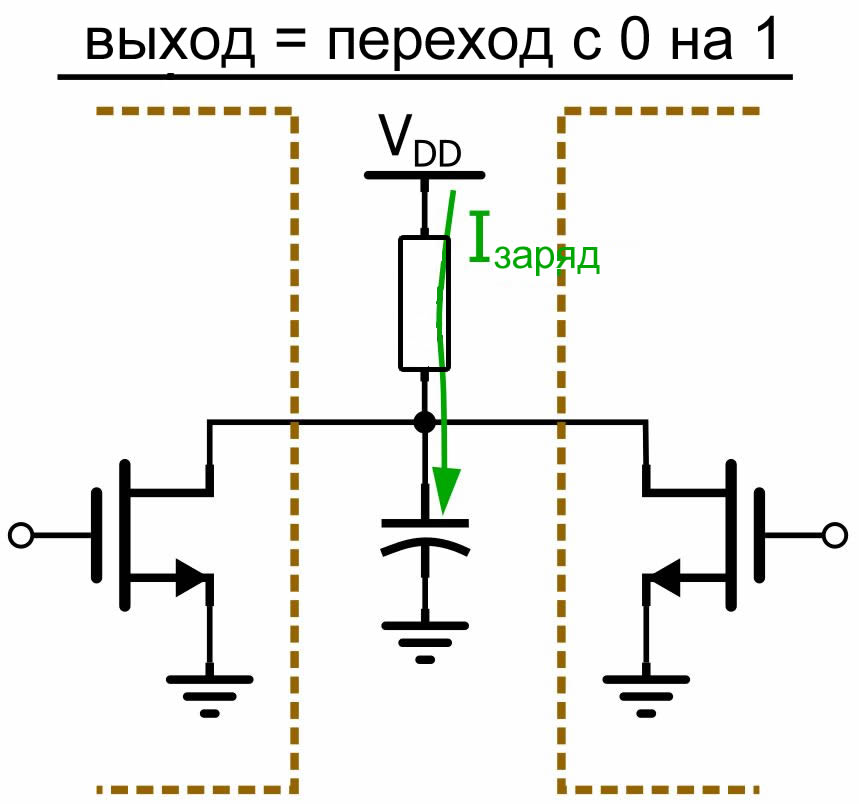
Некоторые последствия использования на шине схемы с открытым стоком: Если у вас есть R, то у вас есть RCВыходной каскад с открытым стоком ни в коем случае не является стандартной схемой среди цифровых микросхем, и для этого есть причина: он обладает некоторыми существенными недостатками. Один из этих недостатков становится очевидным, когда мы напоминаем, что емкость есть везде. Изменение напряжения ограничено временем, необходимым для заряда или разряда емкости, связанной с определенным узлом. Проблема в том, что подтягивающие резисторы на линиях SCL и SDA ограничивают ток заряда; другими словами, мы имеем гораздо большее сопротивление в RC цепи, постоянная времени которой регулирует переход напряжения от логического низкого уровня в логическому высокому уровню.
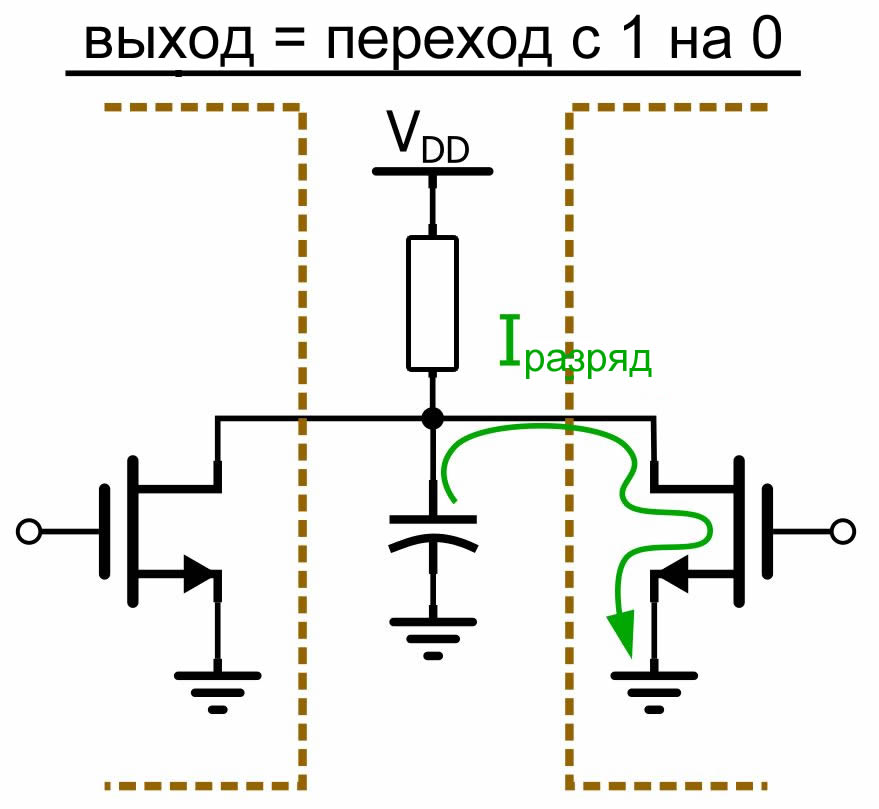
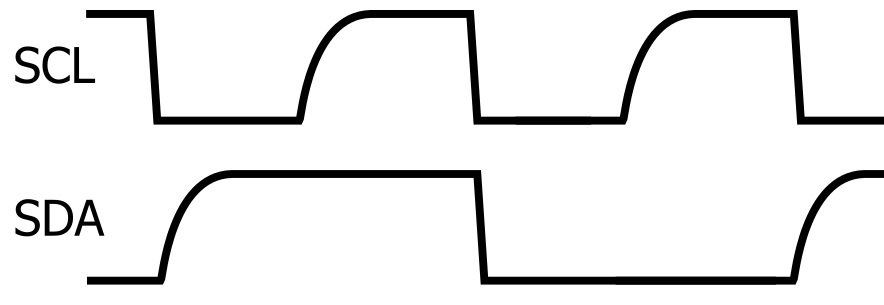
Как показывают эти диаграммы, переход от низкого уровня к высокому будет происходить значительно медленнее, чем переход от высокого уровня к низкому, что приводит к классической «пилообразной» форме сигналов I2C:
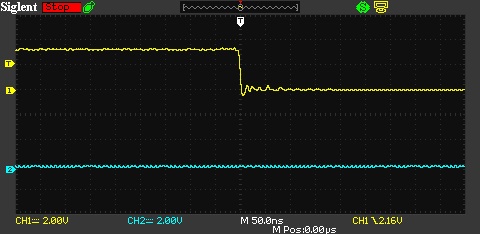
Эти две осциллограммы показывают переход от низкого уровня к высокому и от высокого уровня к низкому для тактового сигнала шины I2C с подтягивающим резистором 1 кОм и минимальной емкостью (только два устройства на шине с короткими дорожками на печатной плате).
Как выбрать номинал подтягивающих резисторовНа этом этапе должно быть очевидно, что подтягивающее сопротивление накладывает ограничения на максимальную тактовую частоту конкретной шины I2C. На самом деле здесь оказывают влияние и сопротивление, и емкость, хотя емкость от нас мало зависит, потому что она определяется, главным образом, тем, сколько устройств подключено к шине, и характером соединений между этими устройствами. Это приводит к важному вопросу: «Какой выбрать номинал для подтягивающего резистора?». Компромисс между скоростью и рассеиваемой мощностью: более низкое сопротивление уменьшает постоянную времени RC цепи, но увеличивает величину тока, протекающего от VDD на землю (через подтягивающий резистор), когда на SCL или SDA выставлен низкий логический уровень. Официальная спецификация I2C (стр. 9) гласит, что напряжение не считается «логическим высоким уровнем», пока не достигнет 70% от VDD. Вы можете вспомнить, что постоянная времени RC цепи говорит нам, сколько времени потребуется, чтобы напряжение достигло примерно 63% от конечного напряжения. Таким образом, для простоты будем считать, что R×C говорит нам, сколько времени потребуется, чтобы уровень сигнала вырос от напряжения, близкого к потенциалу земли, до уровня логической единицы. Теперь, как найти емкость? «Простой» способ – это сборка всей системы и измерение емкости; по крайней мере, это, вероятно, проще, чем пытаться выполнить точный расчет, который учитывает каждый источник емкости – как отмечает рекомендация от Texas Instruments, «при обычном построении электрических схем формируется невообразимое количество конденсаторов». Если подход с измерением не подходит (как это часто бывает), вы можете выполнить приблизительную оценку, определив емкость вывода для каждого устройства на шине (здесь вам поможет техническое описание), а затем добавить 3 пФ на дюйм дорожки на печатной плате и 30 пФ на фут коаксиального кабеля (эти цифры взяты из той же рекомендации, стр. 3). Предположим, что у нас емкость шины составляет 50 пФ, и мы хотим соответствовать спецификации «стандартного режима» I2C, в которой указано, что максимальное время нарастания составляет 1000 нс. \[t_<нарастания>=1000\ нс=\left(R\right)\left(50\ пФ\right)\ \ \Rightarrow\ \ R=20\ кОм\] Таким образом, можно соответствовать требованиям спецификации с Rподтягивающий = 20 кОм : это значение также дает минимальное энергопотребление. Как насчет скорости? Предположим, вы хотите, чтобы длительность присутствия высокого логического уровня на линии синхронизации было, по крайней мере, в три раза больше времени нарастания. Если 167 кГц не достаточно много, вы можете снизить сопротивление (за счет увеличения энергопотребления), пока не достигните желаемой тактовой частоты. (Фактически, «стандартный режим» ограничивает тактовую частоту до 100 кГц, но вы можете адаптировать эти спецификации под потребности вашей системы.) Это грубые расчеты, но, честно говоря, вам не нужно беспокоиться о том, чтобы найти идеальное сопротивление. Этот общий подход может помочь вам поставить резистор разумного номинала, и вы всегда можете поменять резисторы, если что-то работает не так, как вы хотите. ЗаключениеЕсли эта статья выполняет свою цель, то вы теперь хорошо знакомы с основными деталями, связанными с разработкой аппаратного обеспечения I2C. А реализацию программного обеспечения мы рассмотрим в отдельной статье. |