Можно ли и как переносить точку приложения силы в твердом теле
В § 35 мы видели, что равные по модулю силы, действующие вдоль одной прямой в противоположные стороны, уравновешивают друг друга. При этом несущественно, к какой именно точке тела на этой прямой приложены силы. Так, на рис. 96 показаны два случая приложения к телу равных по модулю и противоположно направленных сил  и
и  , действующих вдоль одной прямой. Оба случая различаются только точкой приложения силы (
, действующих вдоль одной прямой. Оба случая различаются только точкой приложения силы (  или
или  ); в обоих случаях тело остается в равновесии.
); в обоих случаях тело остается в равновесии.

Рис. 96. а) В точках и  к телу приложены равные по модулю силы и противоположного направления; в теле возникает деформация и появляются упругие силы
к телу приложены равные по модулю силы и противоположного направления; в теле возникает деформация и появляются упругие силы  и
и  . б) При перенесении силы из точки в точку равновесие не нарушается
. б) При перенесении силы из точки в точку равновесие не нарушается
Таким образом, в случае равновесия двух сил точку приложения силы можно переносить вдоль ее направления, не нарушая равновесия твердого тела. Опыты показывают, что такой перенос не меняет действия силы и в других случаях. Например, одна сила, приложенная к телу, вызовет одно и то же ускорение тела как целого, где бы ее ни приложить.
Точку приложения силы можно переносить вдоль ее направления, не меняя действия силы на тело в целом. Мы можем не только в действительности переносить точки приложения сил, но можем производить эту операцию и мысленно для того, чтобы упростить рассуждения при решении тех или иных задач. Этим приемом часто пользуются как для определения условий равновесия, так и при изучении движений твердого тела.
Хотя перенос точек приложения сил не меняет их действия на тело в целом, такой перенос изменяет распределение деформаций и сил упругости в реальном теле. В самом деле, в рассматриваемом примере, когда силы приложены к точкам и , они вызывают деформацию тела: в области между точками и , возникает растяжение и появляются силы упругости и которые действуют между частями тела, уравновешивая приложенные извне силы и , и прекращают дальнейшие деформации. Если же сила приложена в точке , то растяжение захватывает уже область от точки до точки . Однако в обоих случаях упругие силы и возникают уже при ничтожных деформациях, а так как мы не обращаем внимания на деформацию (рассматриваем тело как абсолютно твердое), то различие в деформациях роли не играет.
© 2021 Научная библиотека
Копирование информации со страницы разрешается только с указанием ссылки на данный сайт
Можно ли и как переносить точку приложения силы в твёрдом теле?
Можно ли и как переносить точку приложения силы в твёрдом теле?

Точку приложения силы можно переносить вдоль ее направления, не меняя действия силы на тело в целом.


От чего зависит результат действия силы?
От чего зависит результат действия силы?
А)от точки приложения
б)от направления(вектора) силы в)от модуля силы
Г)от расположения тела относительно других тел.
Чему равна и куда направлена равнодействующая трёх сил, приложенных к телу в точке A и действующих вдоль одной прямой?
Чему равна и куда направлена равнодействующая трёх сил, приложенных к телу в точке A и действующих вдоль одной прямой.
Модули сил указаны на рисунке.

Одна и та же сила, действуя на тело, может вызвать различный результат?
Одна и та же сила, действуя на тело, может вызвать различный результат.
Этот результат зависит от : 1)направления силы 2)модуля силы 3)точки приложения 4)массы тела 5)плеча силы.

Сила, выталкивающая тело из жидкости или газа, направлена А) противоположно силе тяжести, приложенной к телу Б) в направлении силы тяжести, приложенной к телу В) вначале в направлении силы тяжести, по?
Определите, чему равна равнодействующая двух сил, приложенных к телу в точке М?
Определите, чему равна равнодействующая двух сил, приложенных к телу в точке М?
Определите направление движения тела.

Чему равна равнодействующая трех сил приложенных к телу в точке а срочно плизззз?
Чему равна равнодействующая трех сил приложенных к телу в точке а срочно плизззз.

Может ли существовать сила без точки Ее приложения?
Может ли существовать сила без точки Ее приложения?
Может ли она и та же сила иметь несколько точек приложения.
Чему равна равнодействующая сил приложенных к телу в точке А?
Чему равна равнодействующая сил приложенных к телу в точке А?
Рисунок в билете 11.
Определите расположение точки приложения силы веса тела, покоящегося на столе?
Определите расположение точки приложения силы веса тела, покоящегося на столе.
Вот, я думаю, сто так850 : 500 = 1, 9 м / с.

A = F * S * cosL F = m * g = 100 Н A = 100 * 5 * cosL = 433 Н CosL = корень из 3 делить на 2.

Сообщающимисяназываются сосуды, которые имеют связывающие их каналы, заполненные жидкостью. ЗАКОН СООБЩАЮЩИХСЯ СОСУДОВ : В сообщающихся сосудах, заполненных однородной жидкостью, давление во всех точках жидкости, расположенных в одной горизонтальной..
Скорость велосипедиста : v = S / t v = 2000 / 250 = 8 м / с = 28. 8 км / час.
В реакторах 235 / 92U облучают МЕДЛЕННЫМИ нейтронами. В результате деления получаются два осколка + энергия + (2, 3) быстрых нейтрона, которые потом для получения цепной реакции нужно замедлять! Примеры : 235 / 92U + 1 / 0n = >144 / 56Ba + 89 / 36K..
Можно ли и как переносить точку приложения силы в твердом теле

1. Система сходящихся сил, действующих на твердое тело, имеет равнодействующую, которая равна геометрической сумме этих сил и проходит через точку пересечения их линий действия.
2. Для равновесия тела под действием системы сходящихся сил необходимо и достаточно, чтобы были равны нулю суммы моментов всех сил данной системы на каждую из координатных осей.
3. Укажите количество независимых уравнений равновесия при действии пространственной системы параллельных сил: 3.
4. Система двух равных по модулю параллельных сил, направленных в противоположные стороны, называется парой сил.
22. Алгебраический момент пары сил равен алгебраическому моменту одной из сил пары относительно точки приложения другой силы или, то же самое, равен взятому со знаком плюс или минус произведению модуля одной из сил пары на плечо.
23. Силы, с которыми связи действуют на данное тело, называются реакциями связей.
24. Укажите количество независимых уравнений равновесия при действии на тело произвольной плоской системы сил: 3.
25. Реакция опорной точки перпендикулярна опирающейся поверхности.
26. Теорема о трех силах: Если твердое тело находится в равновесии под действием трех непараллельных сил, лежащих в одной плоскости, то линии действия этих сил пересекаются в одной точке.
27. Две пары, действующие на твердое тело и лежащие в пересекающихся плоскостях, эквивалентны одной паре, момент которой равен геометрической сумме моментов составляющих пар.
28. Реакция идеальной нити направлена по нити от закрепленного тела.
29. Сумма моментов сил пары относительно произвольной точки равна моменту пары.
30. Для равновесия твердого тела под действием системы сходящихся сил, необходимо и достаточно, чтобы силовой многоугольник, построенный на этих силах, был замкнут.
31. Задачей статики является изучение методов преобразования систем сил в другие эквивалентные данным.
32. Реакция жесткой заделки состоит из одной силы и пары сил. Момент этой пары называется моментом заделки.
33. Моментом силы относительно оси называется алгебраическая величина, равная проекции вектора момента силы относительно произвольной точки оси на эту ось.
34. Реакция цилиндрического шарнира лежит в плоскости, перпендикулярной оси шарнира, может быть представлена двумя взаимно-перпендикулярными составляющими.
61.Количество независимых уравнений равновесия при действии на ферму произвольной плоской системы сил.
3
62.Центром тяжести твердого тела называется центр параллельных сил тяжести частиц данного тела.
63. Количество независимых уравнений равновесия узла фермы, находящегося под действием плоской системы сходящихся сил:
2
2)Fmaxтр=fN – Закон трения скольжения
70. Центр тяжести треугольника совпадает с точкой пересечения его медиан.
a⃗ =a⃗ r+a⃗ e+a⃗ c, a⃗ c=2ω⃗ e×v⃗ r – Теорема Кориолиса
104. Теорема о сложении скоростей: При сложном движении точки абсолютная скорость равна сумме ее относительной и переносной скоростей.
105. Переносное ускорение точки − это ускорение того места подвижной системы координат, с которым в данный момент совпадает движущаяся точка.
106. Угловая скорость тела при его плоском движении, скорость его произвольной точки A и расстояние от этой точки до мгновенного центра скоростей P связаны соотношением:
ω=vAAP
Да
114. Зависит ли угловая скорость твердого тела, совершающего плоское движение, от выбора полюса?
Не зависти
115. Правило Жуковского: Для определения направления ускорения Кориолиса надо вектор относительной скорости спроецировать на плоскость, перпендикулярную оси вращения в переносном движении, и повернуть в сторону вращения на угол 90 град.
116. Модуль ускорения Кориолиса:
ac=2∣ω⃗ e∣∣v⃗ r∣sinα
Верно
Всякую силу, действующую на абсолютно твердое тело, можно перенести вдоль линии ее действия в любую точку тела, не нарушив при этом его механического состояния.

Пусть на тело в точке А действует сила F(рис. 9). В произвольной точке В на линии действия силы F приложим две уравновешенные силы F ¢ и F ¢¢, (равные по модулю силе F и направленные в противоположные стороны). Состояние тела в этом случае не нарушится, так как силыF и F ¢¢ также образуют уравновешенную систему, которую можно отбросить. Таким образом, силу F можно заменить равной силой F ¢, перенесенной по линии действия силы F из точки А в точку В.
Векторы, которые можно переносить по линии их действия, называют скользящими. Как показано выше, сила является скользящим вектором.
Полученный результат справедлив только для сил, действующих на абсолютно твердое тело. При инженерных расчетах им можно пользоваться лишь тогда, когда определяются условия равновесия той или иной конструкции и не рассматриваются возникшие в её частях внутренние усилия.
| а) |  |
| б) |  |
| в) | 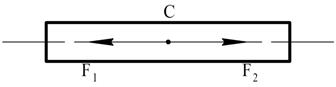 |
Так, в случае, приведенном на рисунке 10а) стержень АВ находится в равновесии если F1= F2. При переносе точки приложения силы F1 в точку В, а силу F2 в точку А (рис. 10 б) или при переносе точек приложения обеих сил в какую-либо точку С стержня (рис. 10 в) равновесие не нарушится.
Однако внутренние усилия будут в каждом из рассмотренных случаев разными. В случаях: а) стержень под действием приложенных сил растягивается; б) стержень будет сжиматься; в) стержень не напряжен.
Упражнения Консультации
3. Нарушится ли равновесие твердого тела, если равные по модулю силы F1 и F2 поменять местами?  | 3. смотрите следствие из 2-й и 3-й аксиом. (Не нарушится). |
4. Нарушится ли равновесие твердого тела, если силу F1 перенести из точки А в точку С? F1= –F2  | 4. смотрите следствие из 2-й и 3-й аксиом. (Не нарушится). |
5. Будут ли данные системы, изображенные на рисунках а, б и в эквивалентны нулю? çF1ç=çF2ç; çF3ç=çF4ç а) б) в)  | 5. Системы сил а) и в) уравновешены, т.к.çF1ç=çF2ç и çF3ç=çF4ç; их можно отбросить. Системы а) и в) станут эквивалентны системе б), а, следовательно, эквивалентны нулю. |
2.1.4 Аксиома 4определяет правила сложения двух сил
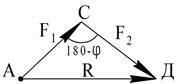
Равнодействующая двух сил, приложенных в одной точке, приложена в точке их пересечения и равна по величине и направлению диагонали параллелограмма, построенного на этих силах как на сторонах(рис. 11).
Правило 1определения равнодействующей (правило параллелограмма)
Определение равнодействующей двух сил по правилу параллелограмма называется векторным или геометрическим сложением и выражается векторным равенством, (рис. 11): R = FS = F1 + F2.

Равнодействующая двух пересекающихся сил равна геометрической (векторной) сумме этих сил и приложена в точке их пересечения.
Правило 2 определения равнодействующей (правило векторного «силового» треугольника)
Если из конца первой силы F1 отложить вторую силу F2, тогда равнодействующая есть вектор, идущий из начала первой силы в конец второй.
Модуль равнодействующей двух сил можно определить из D АСД по теореме косинусов, (рис. 12):

где: 
тогда:  или
или  .
.
Направление равнодействующей силы определяем по направляющим косинусам:

На основании этой аксиомы одну силу R(FS)можно заменить двумя силами F1 и F2. Замену одной силы несколькими называют разложением данной силы на составляющие. Эта операция называется векторной или геометрической разностью.
2.1.5 Аксиома 5устанавливает,что в природе не может быть одностороннего действия сил (третий закон Ньютона)
При взаимодействии тел всякому действию соответствует равное и противоположно направленное противодействие, поэтому силы, с которыми два тела действуют друг на друга, всегда равны по модулю и направлены по прямой, соединяющей эти точки, в противоположные стороны (рис. 13).
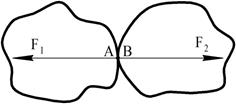
Если на тело В (рис. 13) действует сила F2 со стороны тела А, то на тело А действует со стороны тела В такая же по численному значению сила F1. Обе силы действуют по одной прямой и направлены в противоположные стороны.
Из пятой аксиомы следует, что силы всегда встречаются попарно, все силы носят характер взаимодействий.
Параллельный перенос силы. Главный вектор. Главный момент
УСЛОВИЯ РАВНОВЕСИЯ. СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ И НЕОПРЕДЕЛИМЫЕ ЗАДАЧИ
Рассмотрим следующий случай.
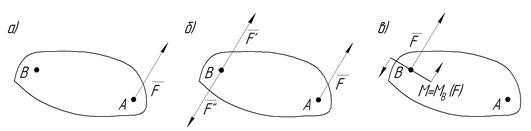
Пусть на твердое тело действует некоторая сила F, приложенная в точке А (рис. 5.1а). По условию задачи необходимо перенести данную силу в точку В, не находящуюся на линии действия силы, не изменяя воздействия на тело силы. Если будет просто произведен перенос силы из точки А в точку В, то произойдет изменение вращательного эффекта силы (нужно сравнить моменты силы в первом и втором случаях относительно любого центра). Поэтому данный способ неприемлем.
Теперь добавим в точку В две взаимноуравновешенные силы F’ и F” (рис. 5.1б), которые по модулю равны и параллельны силе F. Так как силы уравновешивают друг друга, то и воздействие на тело от сил не изменится. В тоже время можно сказать, что система из сил F и F” представляет собой пару сил с моментом равным моменту силы F относительно точки В (рис. 5.1в).
Сформулируем правило параллельного переноса силы: силу, приложенную к абсолютно твердому телу, можно, не изменяя оказываемого ею действия, переносить из данной точки в любую другую точку тела, прибавляя при этом пару с моментом, равным моменту переносимой силы относительно точки, куда сила переносится.
Применяя данную теорему можно любую произвольную систему сил привести к одной силе R*, называемой главным вектором и приложенной в центре приведения, и к паре сил M, называемой главным моментом всех сил относительно центра приведения. Главный вектор определяется сложением сил, а главный момент сложением моментов сил относительно точки приведения.
 (5.1)
(5.1)
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет